







Будущее шпионажа: беспроводная видеокамера на спине жука транслирует видео на 120 метров
Исследователи из школы компьютерных наук и инженерного дела, факультетов электротехники и инженерии Вашингтонского университета в Сиэтле разработали концептуальный проект видеокамеры весом 248 мг (плюс батарейка 0,5 г), которая укрепляется на спине жука или микророботе.

Чёрно-белое видео 1−5 fps с разрешением до 160×120 px передаётся по Bluetooth на расстояние до 120 метров. Объектив поворачивается на 60°. Управление со смартфона.
Ранее учёные проводили опыты по дистанционному управлению жуками (2009), молью (2008) и тараканами (2012) путём стимулирования мозга электродами, так что это очень перспективная смежная разработка. Фактически, сейчас для радиоуправляемых насекомых сделали камера-модуль.
Радиомодуль управления тараканом. Фото: университет Северной Каролины, 2012
Дистанционное управление тараканами — не просто научная разработка. DIY-комплекты для проведения медицинской операции и электроника для установки на таракана уже поступили в открытую продажу.

DIY-комплект для установки на таракана

Операция на таракане в домашних условиях
Есть хорошие результаты и в экспериментах по имплантации в живых насекомых ячейки с биотопливом для питания электроники (см. научную работу 2012 года), то есть все элементы паззла по созданию шпионского жука или таракана-киборга с дистанционным управления складываются вместе.
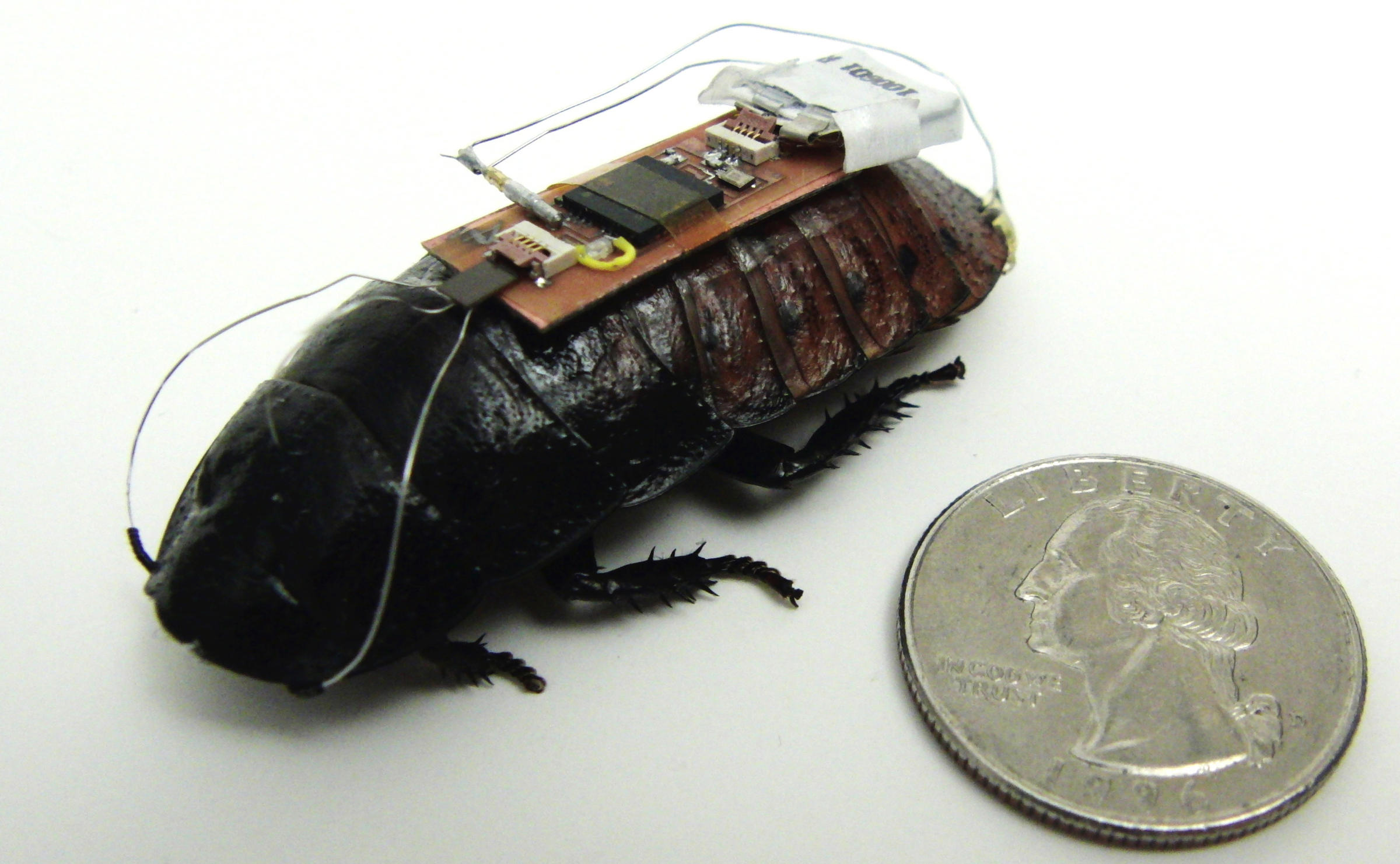
Впрочем, конкретно новая видеокамера питается не от биоячейки, а от 0,5-граммовой батареи на 10 мА. Этого хватает на 6 часов работы при установке на обычном чёрном жуке. Конечно, можно сделать самодельного мобильного робота, но пока что модели человеческой разработки не могут сравниться по манёвренности и мощности с настоящими насекомыми, чей дизайн отточен миллионами лет эволюции.

Варианты миниатюрной беспроводной видеокамеры для чёрного жука и мобильного робота
Разработку новой видеокамеры исследователям пришлось начинать с нуля, потому что никакие существующие решения не годятся. Даже самые маленькие глотаемые видеокамеры, которые снимают внутри человеческого организма, с элементами питания весят более 1 грамма, что слишком много для жука или таракана.
Сосредоточившись на небольших размерах и эффективности, они начали с имеющегося на рынке сверхмалого CMOS-датчика шириной 2,3 мм и весом 6,7 мг. Они выбрали также микросхему Bluetooth 5.0 (шириной 3 мм, 6,8 мг) и начали экспериментировать, как соединить эти две вещи с минимумом промежуточного оборудования для трансляции сигнала камеры.
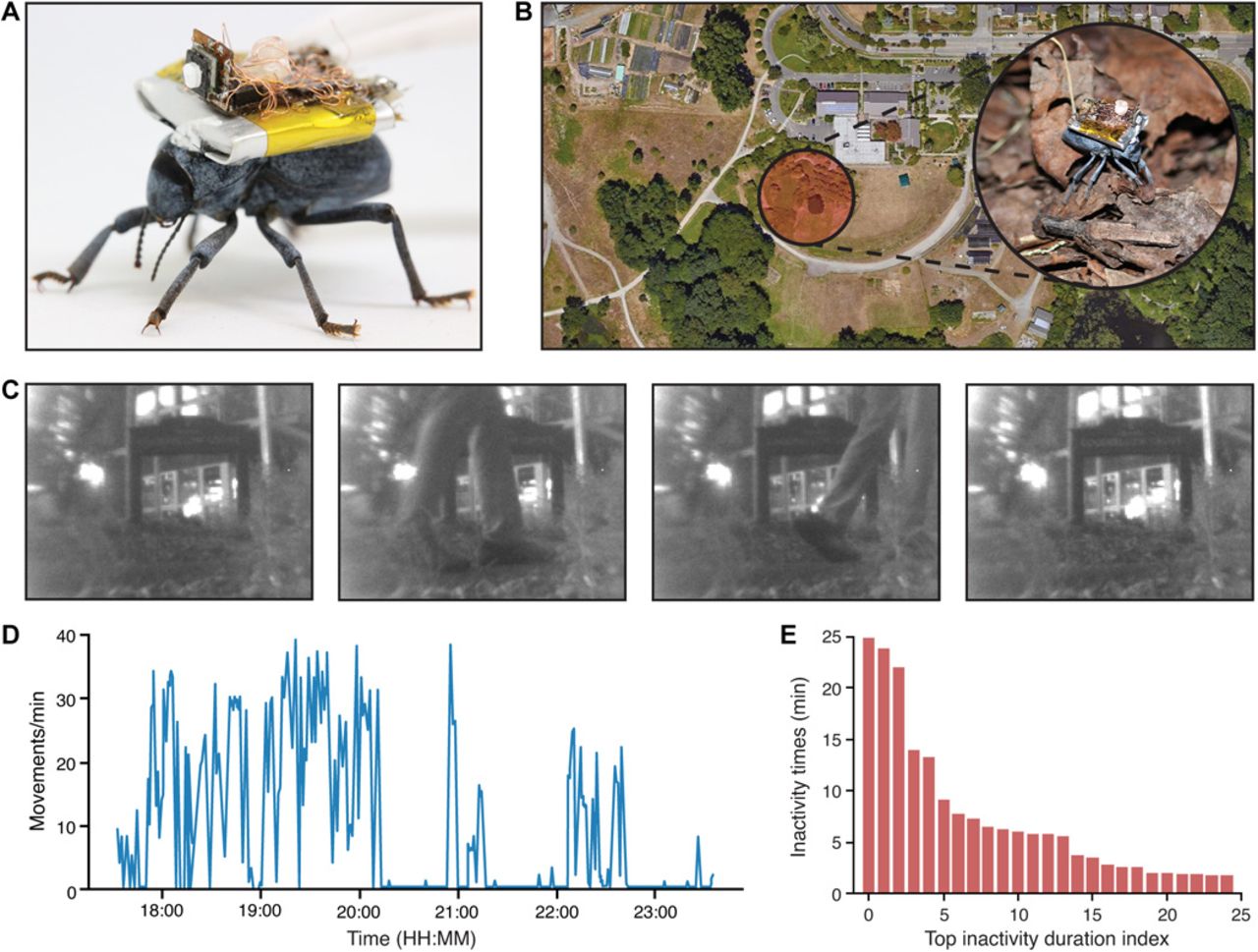
Полевые испытания жука с видеокамерой
Для рабочей камеры также потребовался объектив (20 мг) и антенна, провод длиной 5 мм. На плату поставили акселерометр, чтобы движение насекомого можно было использовать для запуска камеры, сводя к минимуму избыточные кадры от дремлющего жука или неподвижного робота на подзарядке.
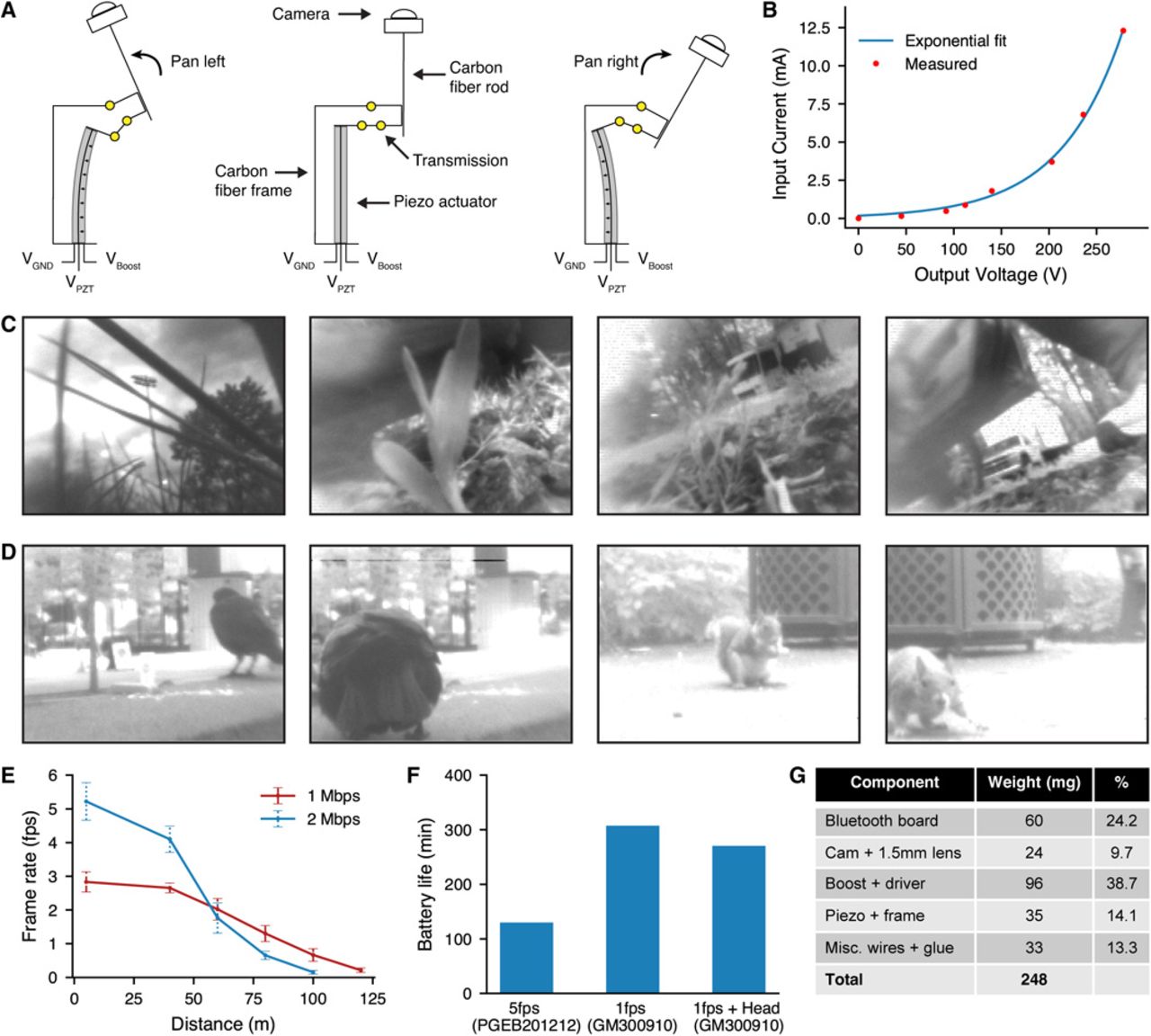
Последний фрагмент схемы — это механически управляемая «головка», весящая 35 мг и доводящая вес беспроводной камеры до 84 мг. Это уже готовый привод с 60-градусным углом поворота, который разработали коллеги из Вашингтонского университета для своих миниатюрных летающих роботов. К сожалению, для пьезоэлектрического привода требуется повышающий преобразователь весом 96 мг. Это огромные затраты, но исследователи пошли на такой шаг, потому что они не могут реально управлять жуком — и вынуждены поворачивать камеру в случае необходимости.
Научная статья «Беспроводное управляемое зрение для живых насекомых и насекомых-роботов» Викрама Айера, Али Наджафи, Йоханнеса Джеймса, Сойера Фуллера и Шьямната Голлакоты из Вашингтонского университета опубликована 15 июля 2020 года в журнале Science Robotics (doi: 10.1126/scirobotics.abb0839).
Чтобы разместить такую видеокамеру на пчелу или муху, нужно провести дополнительную оптимизацию, потому что тот же шмель поднимает не более 100−200 мг полезной нагрузки. Главным ограничением здесь является система питания, так что на шмеле желательно использовать солнечные элементы.

Комментарии
Отправить комментарий