





Крысоподобные роботы заслужили благодарность крыс
Данные последних лет показывают: крысы помогают не только близким родственникам, но и любым особям своего вида, которые уже приносили им пользу. Этот вариант социального поведения считается весьма сложным, и неожиданно, что он присущ грызунам. Новое исследование расширяет список тех, кому крысы готовы прийти на помощь.
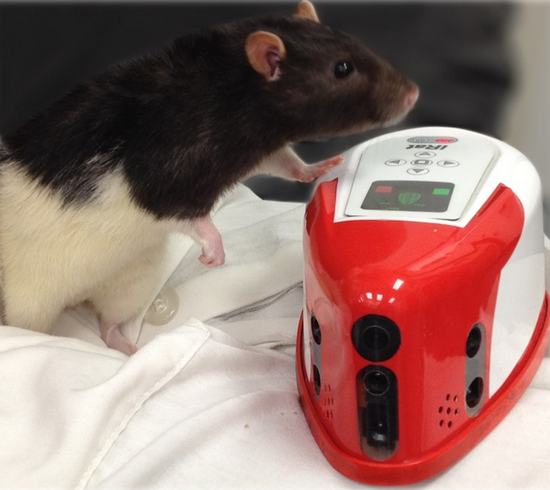
Крысоподобный робот iRat (аббревиатура от англ. intelligent rat animat technology) был разработан для исследований в области нейробиологии. Внешне iRat похож на крысу только размером и тем, что один конец тела — «нос» — заострен, а второй — нет. Отсутствие деталей — часть задумки: чем меньше социальный робот похож на крысу, тем ниже вероятность, что крыса будет общаться с ним «по привычке», спутав его с настоящим сородичем.
Оказывается, эти животные по собственной инициативе вызволяют из заточения даже неживые объекты — как минимум, движущихся крысоподобных роботов.
Автоматизация применяется повсюду, и научные эксперименты не исключение. Существуют автоматические кормушки, поилки, системы очистки воздуха и так далее. Поведение регистрируют с помощью камер с заданными параметрами съемки. В последнее время автоматы применяют не только для записи результатов опытов, но и для того, чтобы вызывать у экспериментального объекта определенную реакцию (см. относительно недавний обзор A. Frohnwieser et al., 2016. Using robots to understand animal cognition). Это позволяет убрать «человеческий фактор», ведь животные, например, реагируют на пол экспериментатора (см.: R. E. Sorge et al., 2014. Olfactory exposure to males, including men, causes stress and related analgesia in rodents), а ученый, в отличие от робота, может незаметно для себя по-разному проводить одну и ту же манипуляцию. Однако область взаимодействий живых организмов с социальными роботами молода, и о том, как животные воспринимают автоматы, еще очень много вопросов. Понимают ли подопытные, что имеют дело с неживыми объектами? Если понимают, влияет ли это на их поведение? Можно ли вообще создать иллюзию «живости» автомата?
Перечисленные вопросы во многом философские, а более практический звучит так: может ли взаимодействие с социальным роботом вызвать у животного по-настоящему социальные реакции?
Разумеется, тут многое зависит от параметров робота. Скорее всего, важны и его размер, и цвет, и запах, и многое другое в совокупности. Но еще со времен исследований инстинктов Конрадом Лоренцом и Нико Тинбергеном мы знаем, что огромную роль в запуске поведенческой реакции играет ключевой стимул. Форма модели рыбы-соперника может быть весьма далека от реального животного, но она спровоцирует самца колюшки на атаку, если ее окраска имитирует брачный наряд этого вида или хотя бы ее часть — ярко-красное брюшко (см., например, статью Е. П. Виноградовой «Инстинкты. Они есть у человека или их нет?»).
Ключевыми стимулами могут быть и определенные позы, и телодвижения. Вообще, движения неживого объекта существенно усиливают эмоции, испытываемые по отношению к нему наблюдателем — как положительные, так и отрицательные (см. Зловещая долина). По крайней мере, так дело обстоит у людей. Это же может быть верно и для других социальных животных — например, крыс.
Из предыдущих работ (см. Серые крысы способны действовать по принципу «услуга за услугу», «Элементы», 13.02.2018; Крысы платят добром за добро, «Элементы», 16.04.2012) мы знаем, что крысы помогают своим сородичам и «просто так», и «в ответ», если раньше уже сами получали от конкретных особей помощь. Они открывают выходы из ловушек, делятся пищей и слизывают со шкурок товарищей доставляющие дискомфорт вещества. Соответственно, можно создать робота, движения которого будут помогать крысам. Именно это и сделали авторы обсуждаемой статьи — сотрудники Калифорнийского университета в Сан-Диего (США) и Квинслендского университета (Австралия). Они собрали двух «крысоподобных» роботов iRat, способных двигаться под дистанционным управлением экспериментатора (рис. 1). Роботов специально сделали довольно непохожими на крыс, чтобы снизить вероятность того, что звери перепутают роботов с живыми сородичами.
«Робокрысы» ездят на колесиках, большая часть их корпуса белая, а передние концы отличаются по цвету: один — зеленый, другой — красный с синими наклейками. Также идентифицировать роботов животным помогают запахи: робот с зеленым «носом» пахнет смирной, а с красным — ладаном. Известно, что эти благовония не вызывают у крыс особых эмоций — ни тот, ни другой запах животные не предпочитают.
В исследовании участвовало восемь взрослых самцов линии Спрег-Доули, мирной и неприхотливой. С шестинедельного возраста их держали парами, чтобы животные привыкали к наличию товарища, способного им помочь (или того, кому, возможно, самому понадобится помощь). Первые пять суток сожительства самцов раз в день помещали в арену диаметром чуть больше метра со множеством игрушек, создававших так называемую обогащенную среду. В такой среде умственные, да и физические способности животных проявляются наиболее полно.
Через две недели после ссаживания, когда крысы привыкли к арене с обогащенной средой, каждого члена пары учили освобождать второго из ловушки — передними лапами нажимать на рычаг на дверце прозрачного плексигласового ящика с отверстиями, через которые можно было взаимодействовать с «заключенным». Притом, когда на арену ставили ловушку, игрушки с нее убирали, чтобы у крыс на них не выработались неприятные ассоциации. Обучение считалось завершенным, если в серии контрольных опытов животное за время эксперимента (300 секунд) освобождало товарища в 80% случаев. Этого показателя достигли все подопытные.
После этого к грызунам на арену стали помещать двух роботов. Один, с красным «носом», почти не двигался с места, а вторым — зеленым — управлял экспериментатор, невидимый для крыс. На привыкание к роботам ушло четыре ежедневных сеанса знакомства, во время которых бело-зеленого робота отодвигали, когда крысы к нему приближались, чтобы показать, что он мирный. Когда крысы перестали его бояться, этот робот стал следовать за ними и копировать их движения — разумеется, те, для которых не нужна мелкая моторика конечностей.
Общий вид экспериментальной установки. Видно, что крысы нюхают одному роботу «нос», как если бы это был сородич, а на второго робота не обращают внимания. Экспериментатора (в левом верхнем углу кадра) животные не видят. На этом и следующих видео черная полоса на спине одного из грызунов — метка нетоксичной краской, показывающая, что в предыдущем опыте он вызволял второе животное из ящика. Видео из обсуждаемой статьи в Animal Behavior and Cognition
На следующем этапе исследования на арену помещали только одну крысу из пары, но по-прежнему двух роботов. Как и в предыдущем опыте, робот с красной передней частью почти не двигался, а робот с зеленым передом толкал рычаг дверцы ловушки и таким образом освобождал грызуна. Это происходило каждый раз через 30 секунд после начала очередного сеанса, и после выхода крысы на волю она могла взаимодействовать с любыми объектами на арене 60 секунд. Чаще всего грызун первым делом обнюхивал «нос» освободившего его робота и пространство вокруг ловушки.
«Отзывчивый» зеленый робот освобождает крысу, в то время как «асоциальный» не делает ничего для спасения грызуна. Видео из обсуждаемой статьи в Animal Behavior and Cognition
В финальной серии экспериментов на арену помещали одну крысу и две одинаковых ловушки, в каждой из которых было по роботу. У животного было 120 секунд, чтобы открыть ящики, и 60 секунд после этого, чтобы «пообщаться» с роботами. После каждого опыта животное забирали с арены, а роботов тем временем меняли местами: это позволяло убедиться, что для грызунов важны они, а не ловушки. Три таких опыта подряд проделывали раз в сутки в течение шести дней, то есть у каждого животного было 18 попыток.
Крыса освобождает робота, который раньше помогал ей выбраться из такого же ящика. Видео из обсуждаемой статьи в Animal Behavior and Cognition
В среднем крысы открывали хотя бы одну ловушку в течение опыта в 76,4% случаев, а в оставшихся 23,6% не выпускали ни одного робота. Из этих 76,4% в 52,8% случаев грызуны освобождали того робота, который сам раньше открывал им дверь (то есть белого с зеленой «головой»), а в 47,2% случаев — второго, не приходившего им на помощь. Такая разница в предпочтении роботов может показаться несущественной, но стоит учесть тот факт, что нередко крысы открывали обе ловушки — то есть проценты посчитаны от суммарного числа нажатий на рычаг. В таком случае животные сначала выпускали помогавшего им в прошлом социального робота, а «асоциального» — только потом. Семь из восьми крыс чаще открывали дверь бело-зеленому роботу и только один самец почему-то предпочитал освобождать бело-красный (рис. 2).

Рис. 2. Статистика исследования. А) — крысы в рамках исследования в принципе часто освобождали роботов из ловушек. В) — животные чаще открывали дверь ящика, где находился ранее освобождавший их робот. С) — семь грызунов из восьми чаще открывали дверь помогавшему им роботу, один — наоборот, и не было животных, которые освобождали двух роботов с одинаковой частотой. Горизонтальная линия в каждом «ящике с усами» обозначает медиану, звездочка в В) — статистически значимые отличия (p < 0,05). Рисунок из обсуждаемой статьи в Animal Behavior and Cognition
Из таких результатов авторы сделали вывод, что крысы способны воспринимать неживые предметы как объекты для социального взаимодействия. Описанная работа — первая, в которой это показано. Хотя роботы мало чем походили на крыс — не имели конечностей, хвоста, вибрисс, ушей, пахли и перемещались не так, как реальные животные — грызуны все равно выполняли с ними те же действия, что и с собратьями. Ученые сочли, что это заслуга просоциальных движений iRat (толкания рычага для освобождения крысы), и главное в них — не натуралистичные параметры, а смысл, их последствия для животного, на которые они направлены.
Описанное исследование продолжает богатую тему взаимодействия животных и неживых объектов. Если предположить, что в будущем искусственный интеллект действительно станет повсеместным, то для нас критически важно понимать, как он будет влиять на поведение нашего и других видов. Ведь поведение тесно связано с экологией и может существенно изменить положение вида в сообществе.
Один из свежих примеров — снижение численности ласточковых попугаев (Lathamus discolor) в Тасмании из-за вторжения в их родные места сумчатых летяг (Petaurus breviceps) (R. Heinsohn et al., 2018. Sex ratio bias and shared paternity reduce individual fitness and population viability in a critically endangered parrot). Помимо прямого вреда популяции попугаев — убийства самок — сумчатые летяги наносят и косвенный. Из-за них доля самцов стала слишком высокой, и они от моногамии перешли ко множественным связям «хоть с какой-нибудь самкой», что для попугаев в принципе не очень свойственно. Самцы дерутся между собой, хотя изначально не склонны к конфликтам такого рода, и мешают самкам выхаживать своих же птенцов, в результате чего те вырастают слабыми или вовсе погибают. Выживаемость детенышей в пересчете на одного отца в данном случае оказывается ниже, чем при моногамии — хотя, казалось бы, моногамия сильнее ограничивает число потенциальных отпрысков.
А пока роботы не внедрились в природные сообщества, ученые используют их в условиях контролируемого эксперимента, вызывая с их помощью у лабораторных животных заданные формы поведения. Как показывает обсуждаемая статья, а вместе с ней и специальный выпуск журнала, в котором она вышла, это вполне плодотворный метод исследования в этологии, и животные могут взаимодействовать с искусственными созданиями так, как если бы те были живыми.
Источник: Laleh Quinn, Luisa P. Schuster, Marcelo Aguilar-Rivera, Joshua Arnold, David Ball, Emmanuel Gygi, Jesse Holt, Daeun J. Lee, Jonathon Taufatofua, Janet Wiles, Andrea A. Chiba. When rats rescue robots // Animal Behavior and Cognition. 2018. DOI: 10.26451/abc.05.04.04.2018.

Комментарии
Отправить комментарий