






Марсолет Ingenuity готов к работе: что он из себя представляет и чем займется в ближайшее время?
Агентство НАСА на днях раскрыло подробности работы марсолета Ingenuity, который опустился на поверхность Красной планеты вместе с марсоходом. Вскоре марсолет попробует освоить воздушное пространство Марса, а пока что НАСА рассказывает о подробностях этого путешествия.
В целом, даже то, что марсолет оказался на Марсе — историческое событие. Если он полетит, на что мы все здесь надеемся — то это будет первый полет на другой планете созданного руками человека «вертолете». Речь, конечно, не о реактивной тяге, не о парении и не о падении — а именно об управляемом вертикальном полете. Все подробности — ниже.
Так вот, «железо» марсолета базируется на плате с SoC Snapdragon 801 от компании Qualcomm. Программное обеспечение — Linux и открытое ПО. По словам агентства, программное обеспечение на основе Linux впервые используется в системах, отправленных на Марс. Использование же открытых и доступных элементов, как «железа», так и ПО, дает возможность энтузиастам повторить конструкцию или сделать нечто свое.
Аппаратное обеспечение обеспечивает высокую производительность, которая нужна марсолету. Дело в том, что для нормального полета необходима работа контура управления с частотой 500 циклов в секунду, плюс анализ изображения с частотой 30 кадров в секунду.
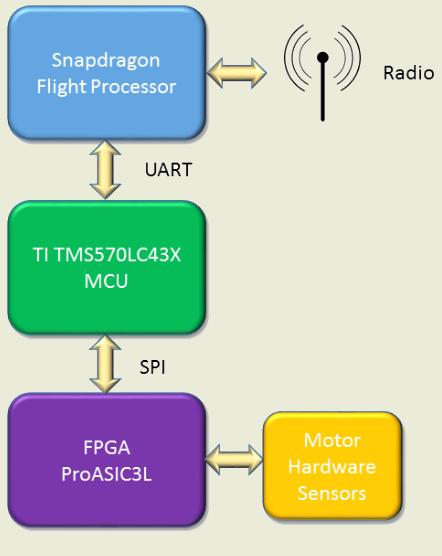
SoC Snapdragon 801 (четыре ядра, 2.26 GHz, 2 ГБ ОЗУ, 32 ГБ Flash) отвечает за работу базового системного окружения на базе Linux. Именно оно выполняет высокоуровневые операции, включая:
• Визуальную навигацию на основе анализа изображений с камеры.
• Управление данными.
• Обработка команд.
• Формирование телеметрии.
• Поддержание канала беспроводной связи.
Посредством интерфейса UART процессор соединяется с двумя микроконтроллерами, это MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 КБ ОЗУ, 4 МБ Flash, UART, SPI, GPIO. Они отвечают для различных функций управления полета. Кроме того, они же используются для резервирования на случай сбоя, так что информация, которая к ним поступает, дублируется.
Задействуется лишь один из микроконтроллеров, но если что-то идет не так, то вступает в работу второй, который способен сразу же перехватить основные функции, заменив проблемного «коллегу». Ну а за передачу информации от датчиков к микроконтроллерам, а также за взаимодействие с актуаторами, которые управляют лопастями винтокрылого летуна, отвечает FPGA MicroSemi ProASIC3L. Он же выполняет переключение на запасной микроконтроллер в случае сбоя.
В предыдущей нашей статье говорилось, что научного оборудования в этом устройстве нет. Но, конечно, это не просто летающая «болванка». Марсолет оснащен лазерным высотомером от компании SparkFun Electronics. Она специализируется на разработке открытого ПО, кроме того, она же и один из создателей самого термина OSHW, Open-source hardware. Кроме того, марсолет оснащен такими компонентами, как гиростабилизатор (IMU) и видеокамеры.
Камер две. Одна из них, VGA, используется в качестве навигационной, отвечает за определение местоположения, направления движения и скорости посредством покадрового сравнения. А вот вторая камера, цветная, 13 МП, будет использоваться для фотографирования местности. Аэрофотосъемка на Марсе — мы живем в будущем!
Большая часть систем марсолета разработана специалистами НАСА, а именно — в лаборатории NASA JPL (Jet Propulsion Laboratory). При этом компоненты, которые применены в конструкции, не уникальные, а типовые, они созданы специально для малых и сверхмалых искусственных спутников Земли (кубсатов) и уже несколько лет развиваются в составе открытой платформы F Prime (F´), распространяемой под лицензией Apache 2.0.
F Prime дает возможность быстро разрабатывать и разворачивать системы управления полетом и связанных элементов ПО. При этом полетное ПО разделяется на отдельные компоненты с хорошо определенными программными интерфейсами. Кроме того, разработчики получают в свое распоряжение С++ фреймворк для обработки очередей сообщений, организации многопоточности, плюс инструменты моделирования, которые позволяют связывать компоненты и автоматически генерировать код.
А что марсолет будет делать на Марсе?
Если коротко, то он взлетит, пролетит по определенному маршруту и примарсится — причем все это без участия человека, в полностью автоматическом режиме. Масса коптера составляет 1.8 кг, он очень легкий, в полет его направят два винта длиной 1,2 м каждый из углеродного волокна.
Полетов будет несколько, продолжительность каждого — 90 секунд. От Земли марсолет находится на расстоянии около 10 световых минут, поэтому управлять им просто нет возможности, как бы инженеры того ни хотели. Все три полета будут осуществляться в одном месте — посадку дрон совершит в одну и ту же точку все три раза. На работу с дроном у НАСА отведен примерно месяц, так что если все пойдет гладко, он сможет совершить еще один полет и сесть, уже в четвертый раз, в новом месте. В первый раз дрон просто взлетит и сядет — все просто. А уж потом, если все получится, его могут прогнать по кругу, попробовать взлететь повыше и выполнить еще несколько «экзотических», по словам инженеров, маневров.
Почему всего 30 дней? Потому, что дрон — это proof of concept технологии взлета и посадки. Даже если все пройдет как нельзя лучше, ученые оставят марсолет и займутся марсоходом — ресурсы проекта ограничены.
Как и говорилось ранее, главная задача дрона — доказать саму возможность полетов в разреженной марсианской атмосфере (всего 1% плотности от земной) и эффективность выбранной технологии. Конечно, на Земле система проходила испытания, но тесты «в поле» всегда были завершающим этапом. Ну, а сейчас испытательный полигон находится в 10 световых минутах от Земли, что поделать.

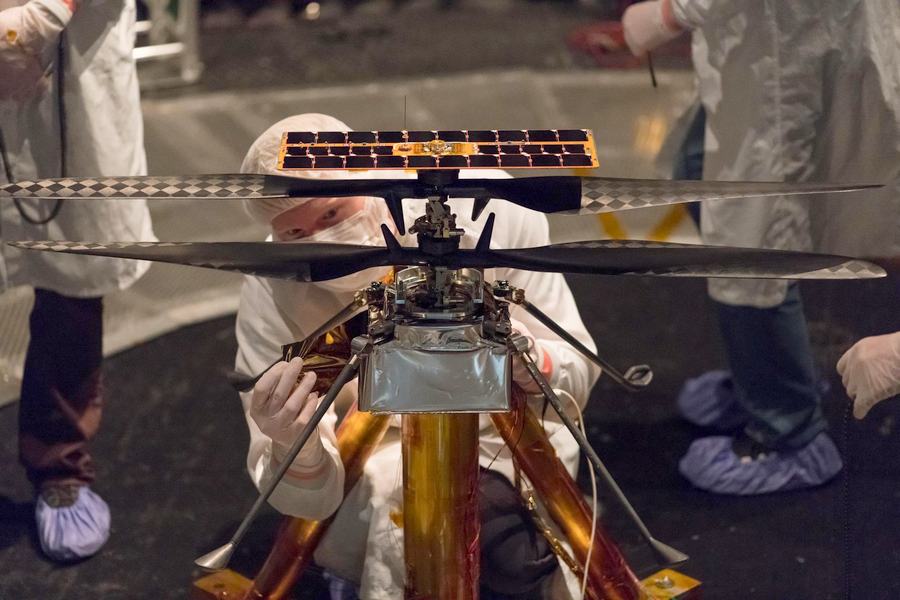
Марсолет снизу
Если марсолет взлетит, он сделает несколько снимков, которые будут иметь уже и научную ценность — с орбиты Марса фотографии в таком разрешении сделать не получится. НАСА, если все пройдет хорошо, смогут отправить на Марс уже большой марсолет, который сможет преодолевать расстояния, которые сейчас марсоход проезжает за дни, в считанные минуты.
Ну а теперь давайте рассмотрим подробнее, что это за летун такой и что он будет делать (чуть приоткроем завесу тайны — летать).

Ingenuity, что ты такое?
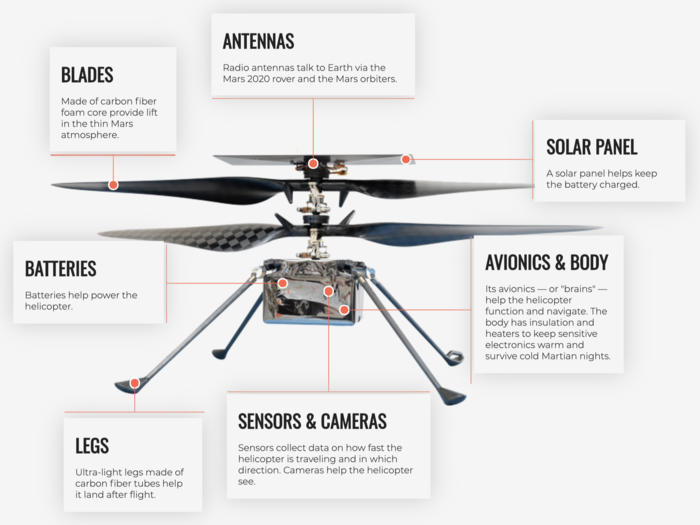
В целом, при взгляде на него возникает ассоциация с коптерами — винты, корпус, вот это все. Выглядит не совсем привычно, но, в целом, ничего супернеобычного. Но когда узнаешь подробности, то смотришь на марсолет уже немного иначе. В целом, все объясняется фразой «это первый аппарат, предназначенный для полета на другой планете».
Он больше, чем кажется. Длина его винтов, вращающихся в противоположные стороны — 1,2 метра. На Земле его вес составляет 1,8 кг. На Марсе наш летун весит меньше — около 0,68 кг. Это помогает аппарату подняться вверх даже в разреженной атмосфере.
Один из его создателей так описал Ingenuity: «Это летательный аппарат, который одновременно является космическим аппаратом». Сложность была не только в том, чтобы адаптировать марсолет к полету в разреженной атмосфере другой планеты, но и в том, чтобы он выдержал взлет с Земли, полет в космическом пространстве в экстремальных условиях, посадку на Марс и потом — распаковку и взлет уже на Марсе.
На Красной планете летун должен снабжать себя энергией сам. Начальный заряд (и обогрев) ему дал ровер, но теперь летательному аппарату придется обеспечивать себя энергией самостоятельно. Этому способствуют солнечные панели, которые размещены на лопастях.
Что касается «начинки», то здесь нет ничего сверхъестественного — всего лишь литий-ионные аккумуляторы и материнская плата, которая вполне могла бы обеспечивать работу средней руки смартфона 2-3 летней давности. Относительная простота конструкции — плюс для марсолета, поскольку меньше шансов на то, что что-то выйдет из строя.
Сложного научного оборудования тоже нет, ведь главная задача системы — доказать, что полеты на Марсе вообще возможны. Аппаратное обеспечение обеспечивает высокую производительность, которая нужна марсолету. Дело в том, что для нормального полета необходима работа контура управления с частотой 500 циклов в секунду, плюс анализ изображения с частотой 30 кадров в секунду.
SoC Snapdragon 801 (четыре ядра, 2.26 GHz, 2 ГБ ОЗУ, 32 ГБ Flash) отвечает за работу базового системного окружения на базе Linux. Именно оно выполняет высокоуровневые операции, включая:
- Визуальную навигацию на основе анализа изображений с камеры.
- Управление данными.
- Обработка команд.
- Формирование телеметрии.
- Поддержание канала беспроводной связи.
Посредством интерфейса UART процессор соединяется с двумя микроконтроллерами, это MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 КБ ОЗУ, 4 МБ Flash, UART, SPI, GPIO. Они отвечают для различных функций управления полета. Кроме того, они же используются для резервирования на случай сбоя, так что информация, которая к ним поступает, дублируется.
В будущем, если все пройдет хорошо, на Красную планету отправятся и другие летательные аппараты — с их помощью можно будет обследовать все гораздо быстрее, чем при помощи колесных роверов. Добраться «наследники» Ingenuity смогут до регионов, куда роверы доехать просто не смогут.
Несмотря на максимальную эффективность конструкции, марсолет несет лишний груз. Но здесь никакой науки, чистая романтика. Дело в том, что после первого своего полета братья Райт распродали части тканевой обшивки планера. И вот один из кусочков этой ткани находится в марсолете.
Откуда он начнет полет?
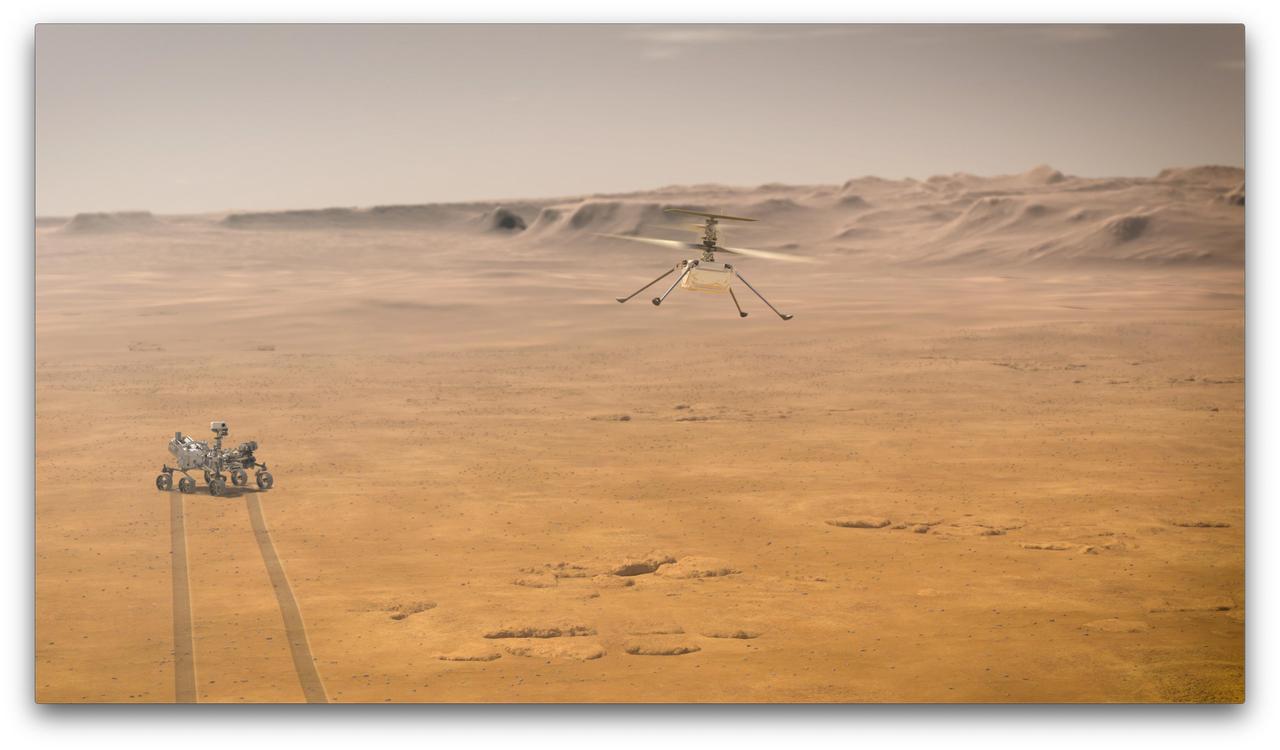
Команда марсохода уже нашла своеобразный аэродром для летательного аппарата. Его развертывание займет около недели, после чего начнется проверка всех систем. Затем марсолет поднимется вверх на три метра.

На «аэродром» его доставит марсоход, который постепенно движется к кратеру Езеро. Полетная площадка небольшая, ее размер составляет 10*10 метров, она ровная и лишена камней. Зона полетов превосходит по размеру аэродром, ее форма — вытянута. В пяти метрах от нее будет находиться марсоход, который зафиксирует маневры своего «коллеги».
Шесть дней подготовки дрона к полету начнутся как раз после того, как ровер доедет до центра марсианского «аэродрома». При этом марсолету предстоит пережить ночь на Марсе. Сначала ровер активирует фиксирующий механизм, после — пиротехническое устройство, которое перерезает кабель. Если все пройдет успешно, то манипулятор, который сейчас удерживает марсолет, развернет его в вертикальное положение.

Затем дрон выдвинет две опоры, потом — еще две. В процессе подготовки аккумулятор марсолета зарядится от ровера, и уже после этого произойдет его спуск на грунт Марса. Потом команда проекта проведет проверку всех систем и раскрутку винтов до 2537 оборотов в минуту. Ну а солнечные панели, о которых говорилось выше, будут заряжать аккумулятор марсохода в течение всего периода испытаний.
Подробности о полете
Батареи марсолета не очень емкие, их будет хватать примерно на полторы минуты полета системы. Всего ученые запланировоали пять полетов с максимальной высотой взлета в пять метров. Наверное, полетов может быть и больше — ведь все мы помним, что расчетный срок эксплуатации Opportunity был 90 дней, да?
Разреженный воздух Марса одновременно усложняет взлет, поскольку он, ну, разреженной, но и увеличивает безопасность полета. Нет ветра (то, что есть на Марсе, несравнимо с земными ветрами), а значит, опрокинуть марсолет будет сложно.
Дрон будет связан с ровером по беспроводной сети. Но пропускная ее способность небольшая, так что снимки полета и, тем более, видео, мы получим не очень скоро.
Начало полета
Если все пройдет хорошо, то первый полет состоится 8 апреля. Именно на апрель рассчитаны те пять полетов, о котрых говорится выше. И все это время ровер не сможет приступить к своей основной научной миссии — он будет служить в качестве «команды поддержки».
Ну а потом марсолет могут просто бросить (будем надеяться, что нет), поскольку у команды проекта ограниченные ресурсы, и главная задача — все же исследование Марса при помощи ровера, а не полеты. Как только возможность взлета будет доказана, ученые переключатся на другие задачи.

Комментарии
Отправить комментарий