







Углубимся в историю: откуда растут ноги у квадрокоптеров
Дроны, дистанционно управляемые вертолеты, шпионские и военные мультикоптеры — все эти летающие устройства уже давно стали частью повседневности. Сегодня электрической бескрылой «леталкой» уже никого не удивишь. Вот оно, держится в небе на своих маленьких вентиляторах, безо всяких крыльев и только за счет электричества!

Однако, до недавнего времени машины с вертикальным взлетом и на электрической тяге были всего лишь недостижимой мечтой. Как же это стало возможным и почему никто их не делал раньше? Кто первым смог поднять электровертолет в воздух? Давайте посмотрим историю появления в нашем небе многопропеллерных жужжалок.
Предпосылки к появлению электрического вертикального взлета
Еще пятнадцать лет назад в небе среди компактных летающих устройств можно было наблюдать только самолеты и вертолеты с двигателями внутреннего сгорания.
И во всем мире, и в СССР основой авиамоделизма неизменно выступали самолеты. Это были кордовые, неуправляемые и радиоуправляемые модели. Про модели вертолетов ходили только слухи, кто-то хвалился, что смотрел на полет такого, но им не верили, и никто радиоуправляемые вертолеты в глаза толком не видел.
Конкурс радиоуправляемых вертолетов 1982 года в СССР
У моделей самолетов с авиадвигателями, работающими не на топливе, а от электричества, дело обстояло получше, но для вертолетостроения электромоторы на протяжении более ста пятидесяти лет, с самого момента их появления, были абсолютно непригодны. Вертолеты на видео 1982 года тоже имеют ДВС-двигатели.
Однако время не стоит на месте, и постепенно появились две необходимые для подъемной электротяги вещи. Во-первых, появились малогабаритные, а также и бесщеточные, или вентильные, электромоторы (https://ru.wikipedia.org/wiki/Вентильный_двигатель).
Дело в том, что до их появления никакие электродвигатели не давали такой мощности, которая была бы достаточной для подъема нужного веса при приемлемой собственной массе. Поэтому электрические моторы можно было применять в автомобилях, трамваях и метро, с их помощью можно было бриться, перемалывать пищу и качать воду. Можно было даже исхитриться и добавить к ним крылья, поставив их на самолет. Однако, первые электродвигатели в самолетах непременно проигрывали по ДВС по всем параметрам. Правда, не все электромоторы нового поколения изначально предназначались для авиации, сейчас мы об этом поговорим.
Рыбак-вертолетчик, 2010 г. Модель с ДВС
А во-вторых, появились компактные и ёмкие аккумуляторы, чему, скорее всего, значительно поспособствовало развитие мобильной электроники. Например, стали производиться литий-полимерные и литий-ионные аккумуляторы, которые пришли на смену никель-кадмиевым и никель-металлогидридным.
Самые первые аккумуляторы не были легкими и компактными, а поднять такой в воздух не представлялось возможным. Поначалу их пытались применять и в автомобилях, но появился двигатель внутреннего сгорания и на тот момент быстро поставил точку в развитии электромобилей. Современные же литий-полимерные аккумуляторы позволили получить бо́льшую ёмкость на единицу массы.
Перопроходцы
Proxflyer
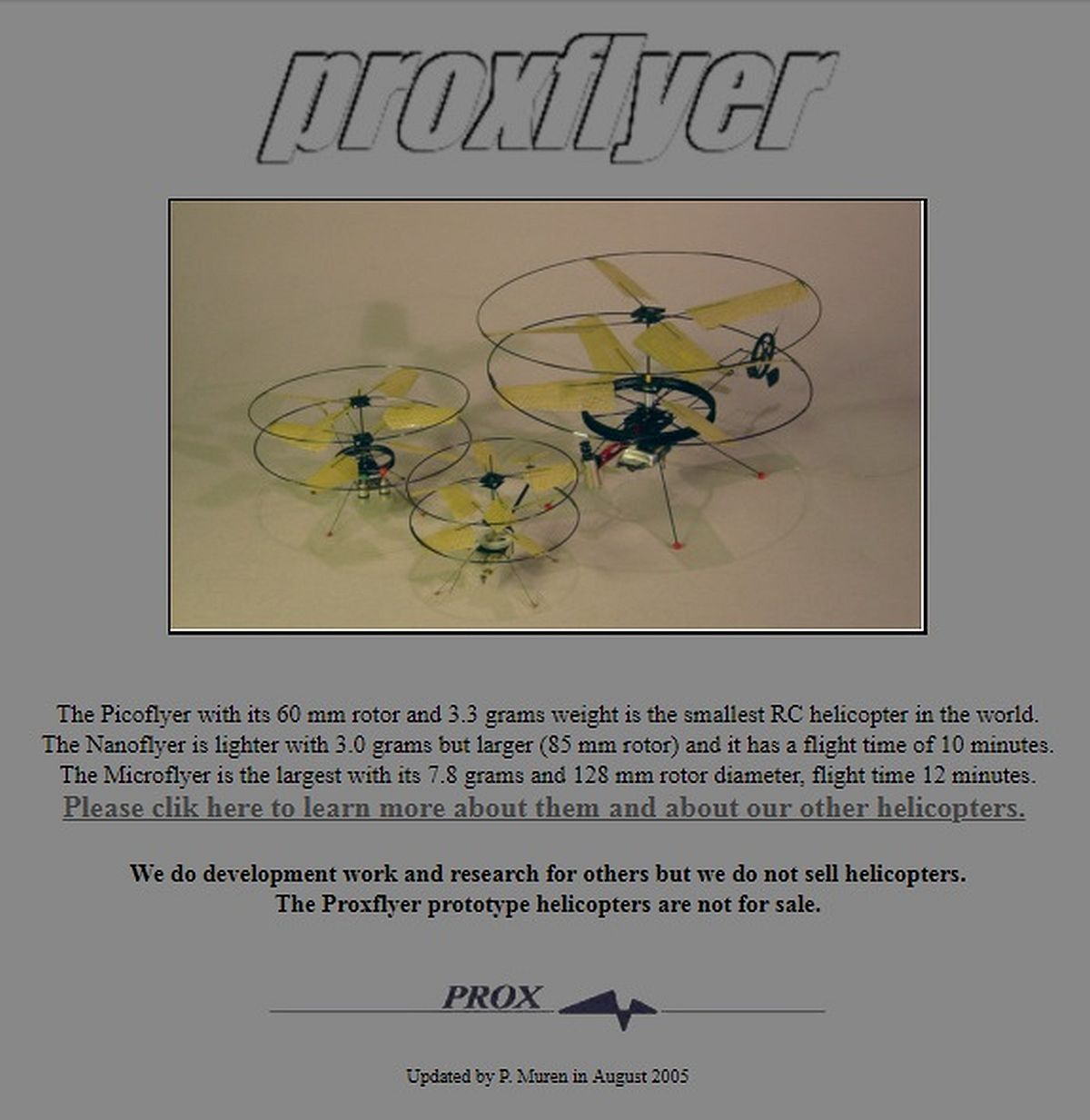
Первым соединить достижения новых технологий догадался норвежский инженер Peter Muren. Он создал сайт с описанием своего первого изобретения в 2003 году, если Archive.org не врет. Сайт назывался Proxflyer.com (именно с таким написанием, через «Y») и содержал фото и видео полетов невероятного для того времени устройства: вертолета размером всего лишь с пачку сигарет, при этом управлявшегося дистанционно.

Archive.org первые версии сайта показывает как созданные в 2003 году (http://web.archive.org/web/20031001000000*/proxflyer.com).
Чтобы заставить модель подняться в воздух, Питер применил самую стабильную в полете вертолетную схему — соосную (как у КА-50 Черной Акулы). В своей конструкции он не стал использовать несуществующие в то время мини-автоматы перекоса и, тем более, гироскопы, тем самым облегчив модель.
Peter Muren демонстрирует первую в мире модель электрического вертолета, 2004 год
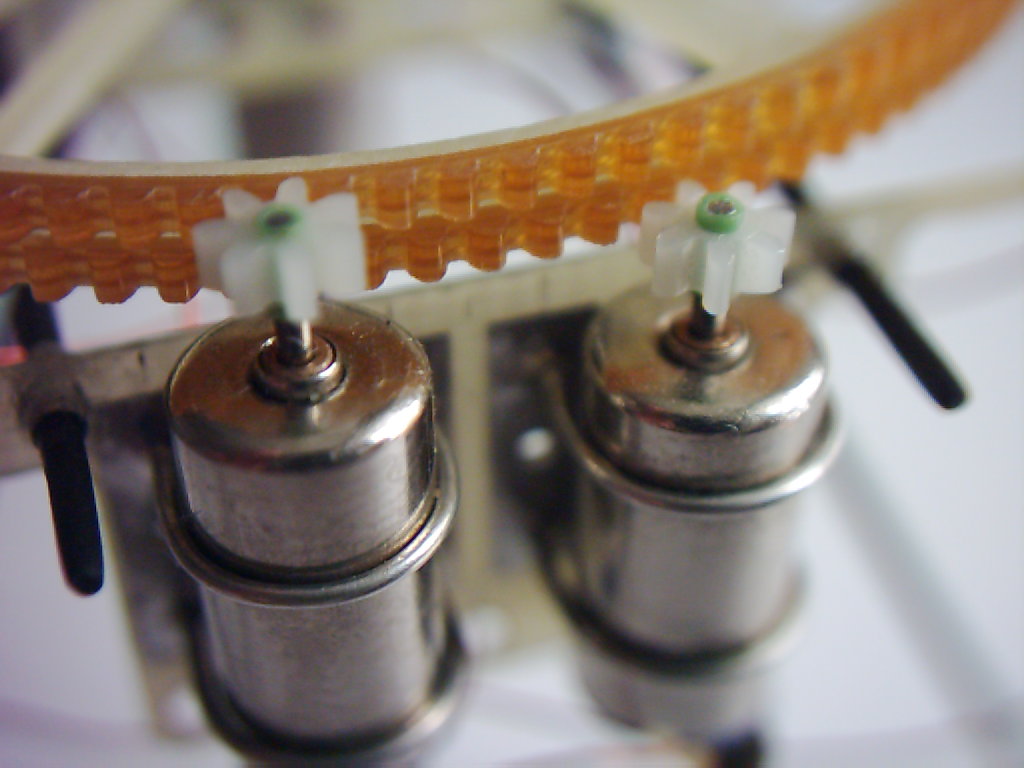
Приводы от электромоторов были выполнены на шкивах, а в качестве ремней использовалась тонкая резинка типа той, которая использовалась в пассиках для кассетных магнитофонов. Шестерней в данной схеме не было. Один мотор крутил оба винта, другой — поворачивал хвост.
Передача про Proxflyer, 2004 год
Не забывайте, что Ютуб был открыт только в 2005 году, поэтому ролик был залит позднее.
Питер смог добиться нужной массы устройства, использовав в своем вертолете новые литий-полимерные аккумуляторы. Для уменьшения веса лопасти и части корпуса вертолета были сделаны из бальзового дерева. В качестве моторов он применил те, которые тогда только что появились и поначалу применялись в виброзвонках пейджеров (кто не знает, что такое пейджер, спросите у своих родителей) и мобильных телефонов. Такие электромоторы так и называли: Pager motor (моторчик из пейджера):
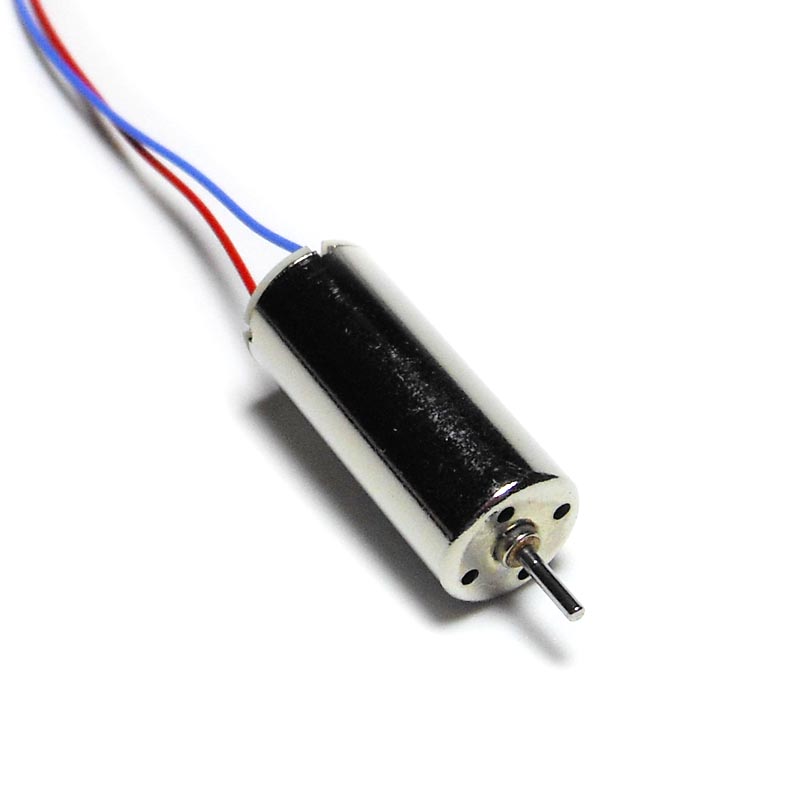
Поэтому первые микромоторы делались совсем не для вертикального взлета.
Позже Питер соорудил другие модели, где смена положения вертолета в пространстве осуществлялось путем изменения скорости вращения одного из двух соосных винтов, а ими управляли отдельные моторы. Всего за подъем их отвечало два.
Движение вперед осуществлялось за счет третьего электромотора, установленного не вертикально, как у классических вертолетов или как у первой модели, а горизонтально и поднимавшего хвост модели кверху.
Инженеру удалось найти такое сочетание миниатюрных и легких моторов с другими снижающими вес деталями, которое, наконец-то, позволило модели воспарить над столом.
Получив патент на свое изобретение, Питер занялся усовершенствованием своих моделей, а чуть позже фирма Interactive Toy Concepts стала производить игрушечные вертолеты по его схеме.
Более новая модель Proxflyer, примерно 2004 год.
Pixelito
Второй схемой, разрабатываемой параллельно, стала схема с вертикальным влетом моделиста из Бельгии по имени Александр. Он назвал свой вертолет Pixelito. Александр применил в нем схему, отличную от Proxflyer, у которой был лишь один несущий винт.
Стабильности ее полёта способствовало специальное устройство на винте: за неимением приемлемых по весу электронных стабилизаторов полета, на винт ставилось массивное навершие, выполнявшее при раскрутке роль гироскопа.
Сверху находится балансир (flybar, Bell/Hiller bar):
Как бы в последствии конструкторы ни пытались, без этой штуки вертолеты с одним винтом летать отказывались. Напомню, что первой вертолетной схеме балансир был не нужен или, может быть, его функцию частично выполняло ограничительное кольцо на лопастях из бальзового дерева.
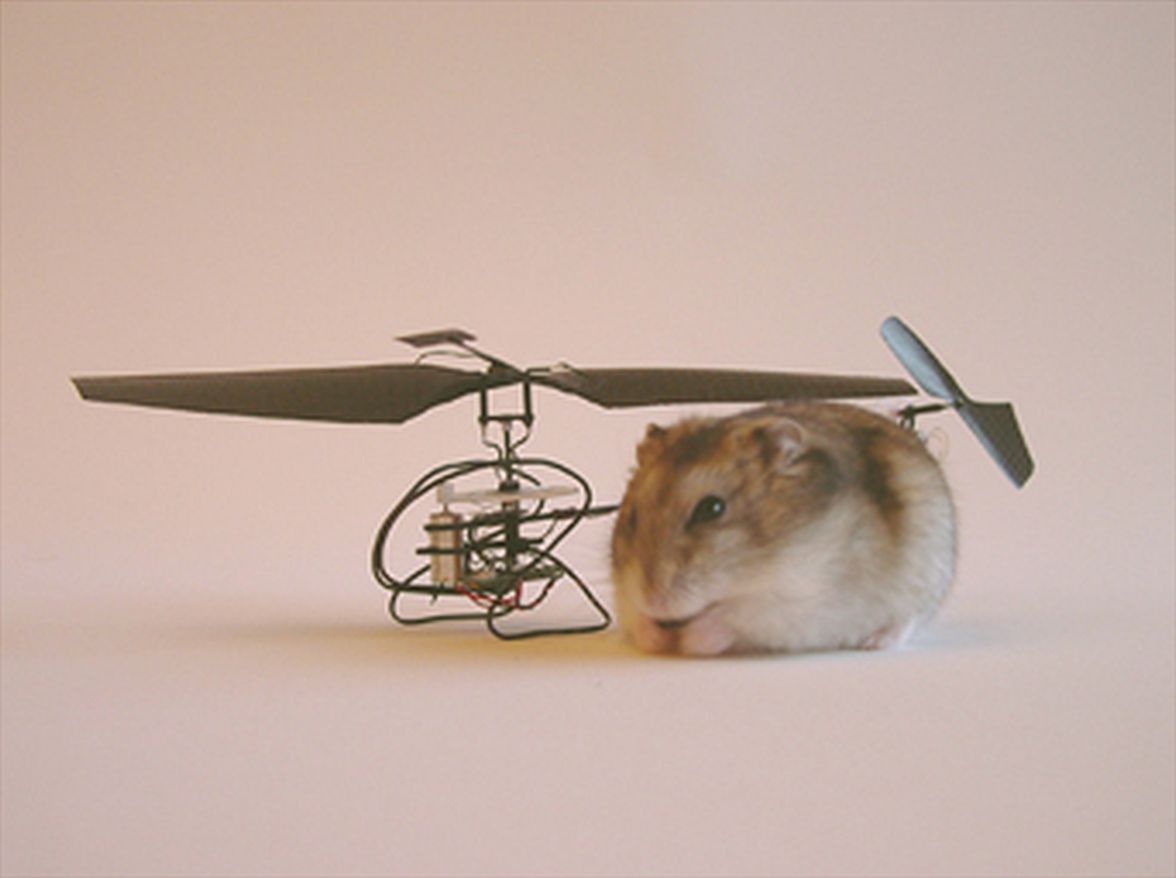
В этой модели моторчика было тоже два: для основного винта, который позволял лететь вверх-вперед, и для стабилизирующего пропеллера, с помощью которого можно было поворачивать. Модель получилась невероятно маленького размера, о чем можно судить по фото с хомячком, оно 2003 года, так что сорри за качество. Модель весила всего 6,9 грамм.
В 2003 году Александр был уже почти у создания работоспособной модели, и нашел Питера, создателя Proxflyer. Они решили объединить усилия, и таким образом довели свои модели до рабочих прототипов.
В записи от 15 Декабря 2003 года говорится:
«Сегодня мы с Питером с удовольствием представляем результат наших последних совместных разработок. Я создал вертолет Pixelito, а Питер — Proxflyer Micron (на тот момент уже не первую модель норвежца — мое примечание). Pixelito — это вертолет с моей собственной системой контроля ротора, а дизайн Питера уже довольно хорошо известен. Мы называем их роботами, потому что такое название характеризует их лучше всего. Примерно 2 недели назад мы с Питером провели чудесные выходные у меня дома и после этого решили, что было бы неплохо вести совместные исследования, каждый у себя дома, но двигаясь к общей цели. Это вылилось в создание модели весом всего 6,9 грамм вместе с аккумулятором, и мы оба знаем, что это не предел.
Александр и Питер»
Видео только что созданного мини-вертолета Pixelito, но в ролике им управляет друг его создателя, автор Proxflyer Peter Muren. Можно догадаться, что Александр держит камеру.
Pixelito, 2003 год.
Третьим прототипом могла бы стать нашумевшая в то же самое время разработка японской фирмы Seiko Epson. Модель могла летать только вверх и вниз.

К сожалению, после первой же новости об этом соосном летающем чудо-устройстве информация про него исчезла, осталась только статья с описанием: https://www.ixbt.com/news/hard/index.shtml?02/35/48.
Судя по всему, разработка не удалась и не получила дальнейшего развития, к тому же, не было ни одного видео с демонстрацией его работы. На фото видно, что в ней была использована схема, в которой соосные винты сочетались с балансиром.
Развитие электрического вертолетостроения
С появлением летающих прототипов идею подхватили и другие производители игрушек, и, используя новые двигатели, аккумуляторы и подобрав более современный и легкий пластик, стали производить модели вертолетов одну за другой, сначала по норвежской схеме, ну а потом и по подобию Pixelito, по-моему, первые серийные модели так и назывались — Pixelito.
Вертолет одной из первых моделей по схеме, аналогичной Proxflyer, фирма Syma, 2007 год
Также одна из первых моделей английской фирмы Fastek Computers, 2007 год
Поначалу вертолеты были, в основном, соосные. Одним из самых плодовитых на тот момент производителей игрушечных радиоуправляемых вертолетов была китайская компания Syma. Авиамоделисты из всех стран также вовсю пробовали разные варианты построек моделей с вертикальным взлетом, и некоторые их достижения были довольно-таки выдающимися, но то, что быстрее всего дошло до конечного потребителя — это продукция фирм-производителей игрушек.
Одна из первых моделей по схеме Pixelito, 2-канальная, лишь с балансиром, 2008 год
В результате как норвежский, так и бельгийский моделисты неплохо заработали на продаже прав на производство вертолетов на дистанционном управлении, сделанных по их схемам.
В последствии разработками Питера заинтересовались DARPA и норвежское Министерство Обороны, инженер создал свою фирму Prox Dynamics и стал разрабатывать вертолет-шпион для военных целей.

Что сейчас там происходит и на какой стадии находится производство, неизвестно.
Улучшения и повышение стабилизации полета
В то время как первые игрушечные вертолеты имели всего 2 канала управления (вперед-вверх и поворот лишь в одну сторону), любители для себя делали и модели на многоканальном радиоуправлении. Чтобы управлять самыми первыми моделями дистанционно управляемых вертолетов, требовалась довольно долгая тренировка, поскольку ровно удержать его в воздухе было довольно трудно, и многое зависело от мастерства пилота.
Для самых простых игрушечных вертолетов вместо радиоуправления применялось управление по инфракрасному излучению. В более продвинутых моделях — по радиоканалу. В дешевых моделях оно было двухканальным, чем дороже — тем каналов управления становилось больше.
В самых дешевых моделях на смену двухканальному управлению добавили третий, и управление стало больше походить на полноценный полет. Вот только держаться в воздухе, несмотря на множество каналов, было все еще непросто.
Обратите внимание, как трудно пилоту совладать с удержанием модели на месте:
Одна из первых моделей вертолетов, схема типа Pixelito, 2007 год.
Появление миниатюрных гироскопов значительно улучшило эту ситуацию. После добавления в модель этого устройства полет становился прямо непривычно стабилен, не надо было постоянно держать пальцы на клавишах управления. Однако такие модели стоили гораздо дороже, чем вертолеты без гироскопа. Гироскопы стали применяться и в моделях вертолетов с ДВС.
Видео про модели вертолетов с гироскопами, 2011 год
Самой популярной из моделей с гироскопом для массового покупателя была модель Syma S107, ну а самыми надежными, выдерживавшими прямые столкновения со стенами, зубы котов и бесконечные тараны мебели, наверное, являлись вертолетики фирмы Himoto.
Демонстрация возможностей электровертолета с гироскопом, 2014 год. А ваш квадрокоптер так умеет?
В военной области первой испытания выстрелов с радиоуправляемого вертолета стала проводить некая фирма Neural Robotics в 2006 году. Они подвесили дробовик на модель вертолета и стали исследовать ее поведение при выстрелах, а также как стрельба отражается на управлении.
Выстрел из дробовика, 2006 год
Их вертолет обладал ДВС, и этот опыт стал знаковым — он подтолкнул развитие направления ударных дронов. Сейчас военные мультикоптеры во всю сбрасывают бомбы, шпионят и наводят ракеты на цели.
Если сомневаешься — ставь больше пропеллеров!
Почти сразу после появления моделей вертолетов начались попытки создания многопропеллерных, если можно так выразиться, машин.

Чем больше пропеллеров было в модели, тем труднее было согласовывать их работу. Тот же вертолет Chinook с картинки выше, без гироскопа колбасило при полете так, что становилось сомнительным применение двух пар винтов. Для полета же моделей с тремя и более количеством двигателей требовалась электроника, на порядок сложнее вертолетной.
Поначалу стали экспериментировать с количеством электромоторов. Это сейчас почти всегда ставится знак равенства между дроном и квадрокоптером, но на заре их появления было совсем не так.
Изначально многомоторные модели собирали исключительно энтузиасты. Почти сразу же возникла идея ставить на модели компактные камеры, которых в то время было не много, а GoPro появилась уже позже, и удачно вписалась в тренд. Камеры собирали из собственноручно припаянных контроллеров к камерам от мобильных телефонов и так далее. Конструкторы мультикоптеров подбирали материалы для их рам, экспериментировали с разными электродвигателями, стали паять различные модули для согласованного управления пропеллерами, писать для этого ПО и обмениваться удачными находками друг с другом. Получалось с переменным успехом.
Пока не было надежной электроники для согласования моторов и не появились миниатюрные гироскопы, смотреть на полеты таких устройств жутковато. Здесь были и поломанные рамы, и потерянные видеокамеры, и утонувшие в водоемах дорогостоящие электронные модули. Однако год от года стабильность, дальность полета, простота управления и качество снимаемых видео постоянно возрастали.
Появились коптеры с двумя, тремя, четырьмя, пятью, шестью, восемью и более пропеллерами — соответственно, бикоптеры, трикоптеры, квадро-, пента-, гекса- и октакоптеры.
Один из первых трикоптеров, 2010 год
И вот, после долгих экспериментов, модели стали уже летать стабильно. Можно было не бояться, что она завалится в воздухе на бок или что вибрация при полете будет мешать управлению.
Бикоптер

Поначалу все ставили себе столько пропеллеров, сколько хотели, но позже каждой схеме, все же, нашлось свое применение.
Пролет квадрокоптера с камерой GoPro Hero 3 на борту через фейерверк, лучше смотреть в HD, 2014 год
Машины с тремя и четырьмя моторами стали чаще применяться для развлекательных полетов, для съемки видео, а увеличенное число пропеллеров пригодилось в коптерах для перевозки грузов, а также в тех случаях, когда от мультикоптера требуется надежность. Ведь если при отказе одного из моторов в модели вертолета неизбежно происходит его крушение, то в случае моделей с несколькими двигателями нагрузку вышедшего из строя мотора можно распределить на другие и удержать машину в воздухе. Долго не утихали споры между приверженцами трикоптеров и квадрокоптеров по поводу баланса между простотой и стабильностью полета.
Октакоптер, специально предназначенный для перевозки грузов, 2012 год
Дальнейшее развитие и перспективы
Благодаря совершенствованию бортовой электроники и использованию модулей GPS, модели научились удерживать свое положение в пространстве и постоянную высоту. На мультикоптеры стали ставить телеуправление, которое по-английски называется FPV — First Person View, вид от первого лица. С его помощью можно управлять дроном, гладя на мир через камеру, установленную на нем. В Сети почти все видео сейчас снимаются с таких дронов.
Проводятся гонки на мультикоптерах, чему способствует система управления с видом от первого лица.
Гонки на дронах с управлением с FPV, 2015 год
Позже одна компания при каком-то технологическом институте стала разрабатывать систему автоматического контроля не одного, а множества мультикоптеров и добилась впечатляющих результатов: они не только смогли заставить летать рой электрических устройств по заданным траекториям, не сталкиваясь. Добавив к ним иллюминацию и используя отдельный мультикоптер в качестве пикселя, они смогли составлять из них объемные изображения и надписи. Свое изобретение они впервые применили в рекламе фирмы Intel.
Голограмма из дронов, 2015 год
Уже в 2011 году построили прототип мультикоптера, способного поднять над землей человека. Сейчас это направление активно развивается. Ведь для перевозки людей здесь есть преимущества перед вертолетами. Это и удобство управления, и более компактные размеры, и электричество в качестве топлива, и безопасность из-за наличия нескольких пропеллеров вместо одного-двух.
Первый мультикоптер с человеком на борту, 2011 год
Устройство дронов продолжает совершенствоваться, для них появляется все больше сфер применения. Мультикоптеры совершенствуют многие авиапроизводители, включая Boeing. Да что там Boeing — сама Почта России уже во всю экспериментирует с доставкой грузов по воздуху.
Полет на квадрокоптере с видом от первого лица, от которого захватывает дух, 2017 год.
Возможно, скоро нас ждут аэротакси, огромные пространственные трехмерные скульптуры из дронов на любом большом празднике, доставка посылок и корреспонденции вне зависимости от того, где вы находитесь, а пиццы — всего лишь за три минуты!

Комментарии
Отправить комментарий